Yes. Our analog sensors can connect to the Hummingbird with the aid of a connector that is available from the Birdbrain Technologies website: http://www.BirdbrainTechnologies.com
or using our Analog Protoboard Adapter (BTA-ELV) connector, a breadboard, and referencing our sensor pinouts guide.
The output from our sensors with the Hummingbird is in the form of a voltage which must be converted to a sensor reading. Most of our analog sensors operate on a 0 – 5 V system, although a few are on a +/-10 V system. Refer to the user manuals of our sensors for this information.
We also (and perhaps more importantly) post calibration information in our sensor user manuals. Most of our analog sensors are linear, so you apply the slope and intercept to this voltage and convert that voltage to a sensor reading. All of this would take place within the program using Operators blocks to perform the mathematical scripts. Here is an example showing the programming for the Dual Range Force Sensor in Scratch and Snap!.
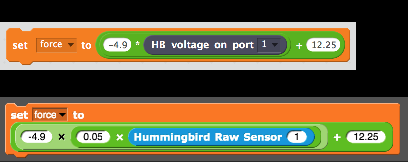
Where force is a variable that we designated using the Data script.
How to connect Vernier sensors to a Hummingbird robot.
Which Vernier sensors will work with the Hummingbird robot?
What programming languages can I use with my Hummingbird when I use Vernier sensors?