Your students will find coding in Python more engaging when you include data collection and sensor technology in your curriculum.
Why Code in Python with Vernier Sensors
Unleash the power of Vernier Technology and Python in your computer science, engineering, or science classroom. Give students the opportunity to code beyond the screen by integrating sensor data collection into their activities.
* Go Direct® spectrometers are not supported.
Physics Meets Programming
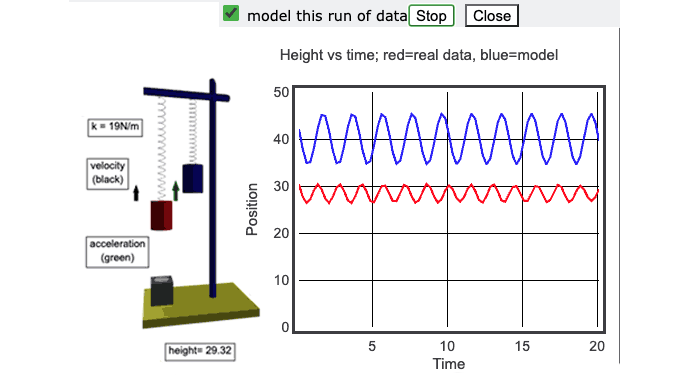
Elevate student learning with Python. Watch as physics experts Dave Vernier and Tom Smith demonstrate how educators and their students can model physics phenomena using Python with Vernier software and sensors.
Web VPython and Go Direct Sensors
Start using our Go Direct sensors with Web VPython—which runs in a browser and requires no software installation. Connect our Go Direct sensors to your Web VPython program via USB or Bluetooth® wireless technology. Our library includes support for Windows®, macOS®, and Chromebooks running a Chrome™ browser.
Check out our guide to get instructions for accessing our Go Direct Library for Web VPython, an introduction to the commands for the library, and access to example programs.
Start using our Go Direct sensors with Python. Our library includes USB or Bluetooth wireless technology support for Windows 10, macOS, and Linux (including Raspberry Pi).
Check out our guide to get instructions for installing Python, choosing a code editor, and installing the Go Direct (gdx) library, as well as access to example code.
When your students integrate LabQuest sensors into their Python programs using a LabQuest interface, they combine a powerful data-acquisition device and sensor input with one of the most prevalent coding languages in education today. Our library includes support for Windows 10 and macOS.
Check out our guide to get instructions for installing Python, choosing a code editor, and installing the LabQuest library, as well as access to example code.
Empower students to code their own data-collection programs with Python! By downloading and transferring Python modules for Go Direct sensors to their TI graphing calculator, students can easily experiment with input and output controls using their collected data.
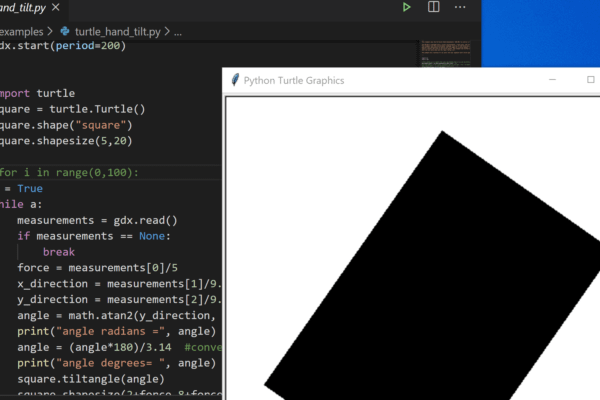
Control the tilt angle and size of a Python turtle graphics object with a Go Direct Hand Dynamometer.
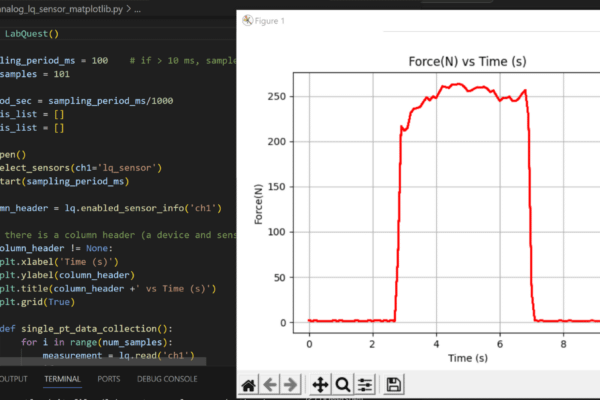
Use the Matplotlib library to visualize LabQuest sensor data.
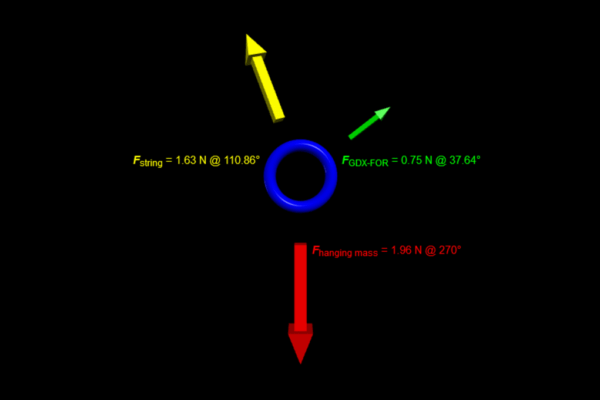
Combine VPython and the 3-axis accelerometer built into Go Direct Force and Acceleration to create a “live” freebody diagram for a ring with three forces acting on it.
Raspberry Pi is a trademark of the Raspberry Pi Foundation.