Propeller-Powered Pendulum
Experiment #11 from Engineering Projects with NI LabVIEW and Vernier
- Subject
- Engineering
Introduction
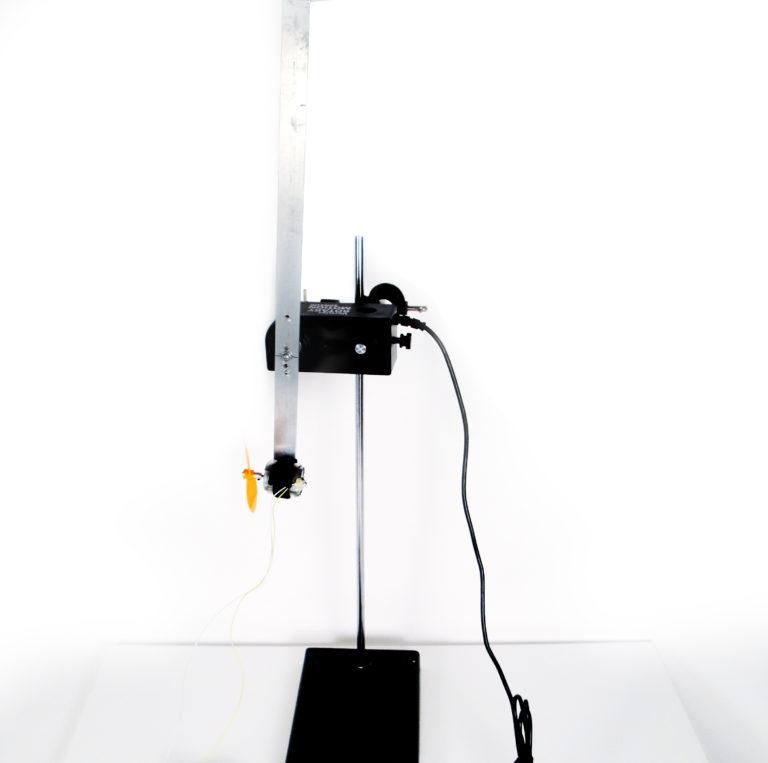
A pendulum is a weighted object suspended from a pivot point. As a pendulum moves, it swings out in a circular arc moving back and forth in a periodic motion. A pendulum usually operates under the influence of gravity; but in this Project, you will use a motorized propeller to power the pendulum’s motion. The spinning blades of a propeller cause a pressure differential on the front and back surfaces resulting in a force that moves the object through the air called thrust. Propeller blades are attached to their hubs at an angle or pitch, much like the threads on a screw. Propeller blades are also twisted. When the propeller is spinning, each section of the blade travels at a different velocity, but the twist in the blade is meant to provide uniform lift along the length of the blade making for a more efficient propeller.
Objectives
Build a physical pendulum driven by a DC motor, a propeller, and a digital controller. You should attach the motor and propeller to the end of a long bar. The Vernier Rotary Motion Sensor will be used for mounting the bar at its pivot point and for measuring the angle of the bar’s swing. You will use the Vernier Digital Control Unit (DCU) to power the motorized propeller and initiate the swing of the bar. The program should pulse the power on and off as needed to keep the bar swinging. For safety reasons, you should limit the range of your bar’s swing to approximately ±20°. The bar angle should be displayed on the front panel, but the bar’s motion should be controlled totally by the program.
Sensors and Equipment
This experiment features the following sensors and equipment. Additional equipment may be required.


Ready to Experiment?
Ask an Expert
Get answers to your questions about how to teach this experiment with our support team.
- Call toll-free: 888-837-6437
- Chat with Us
- Email support@vernier.com
Purchase the Lab Book
This experiment is #11 of Engineering Projects with NI LabVIEW and Vernier. The experiment in the book includes student instructions as well as instructor information for set up, helpful hints, and sample graphs and data.