/*
VernierMotionDetectorPID (v 2017.08)
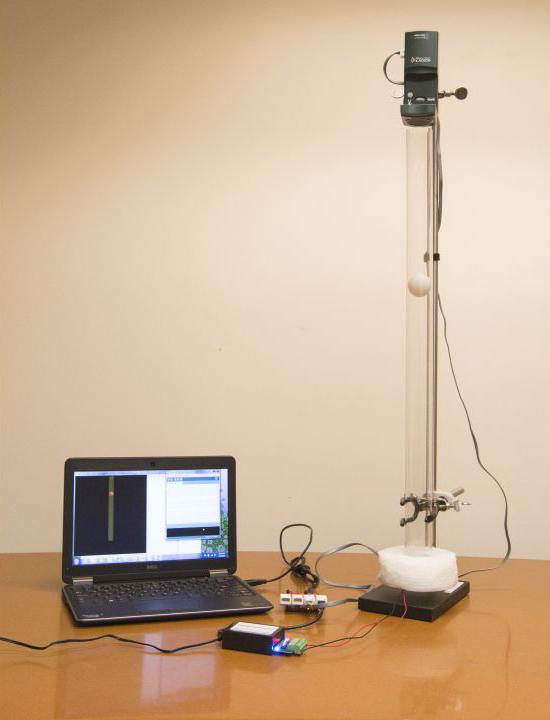
Takes data from a Vernier Motion Detector connected to Digital 1 connector.
Uses PID to control fan to elevate ping pong ball to target height. The ball is in
plastic tube 0.6 m tall with a fan at the bottom and a motion detector at the top.
This version uses a Digital Control Unit (DCU) connected to the Digital 2 port to
control the fan.
Motion detector is read using the Vernier Library that calculates the distance based
the echo of an ultrasonic sound wave.
The PID control is modified from http://playground.arduino.cc/Code/PIDLibaryBasicExample
and takes the calculated input from the motion detector ("distance") and controls analog PWM
output 6 through the DCU (line 1).You will need to download the PID library from
http://playground.arduino.cc/Code/PIDLibrary.
As written, the reading will feed to the PID control continuously and data fed to
Serial Print.
There are several ways you can modify this. We have previously linked the output
of this program to VPython to create a virtual display of the ping pong ball.
Search the internet for tips on combining Arduino and VPython. You can also vary
set point so that it seeks a variety of heights - definitely more eye catching.
See www.vernier.com/arduino for more information.
*/
#include <PID_v1.h>
#include "VernierLib.h"
VernierLib Vernier;
double setPoint, distance, output; //define variables we'll be connecting to
PID myPID(&distance, &output, &setPoint, 3,6.0,6.0, REVERSE);
/*Specify the links and initial tuning parameters. These work for a system
with a 0.6 m tube and the particular fan we are using. Depends on power supply
to the fan as well as cowling around fan.*/
void setup()
{
Serial.begin(9600);
setPoint = 40; // setpoint (cm from top)
myPID.SetMode(AUTOMATIC); //turn the PID on
Serial.println("Vernier Format 2");
Serial.println("Motion Detector Readings taken using Ardunio");
Serial.println("Data Set");
Serial.print("Set Point");
Serial.print("\t"); // tab character
Serial.print ("Distance"); //long name
Serial.print("\t");
Serial.println ("Output from PID");
Serial.print("SP (cm)");
Serial.print("\t");
Serial.print("\t");
Serial.print ("d (cm)"); //short name
Serial.print("\t");
Serial.print("\t");
Serial.println("0 - 255");
}
void loop()
{
distance = Vernier.readMotionDetector();
myPID.Compute();
analogWrite(6,output);
Serial.print(setPoint);
Serial.print("\t");
Serial.print("\t");
Serial.print(distance);
Serial.print("\t");
Serial.print("\t");
Serial.println(output);
delay (10);
}